Industrial Design Engineer in product design/engineering looking for the next big challenge.
About Me

My passion lies in blending beautiful design with functional mechanical, mechatronic, and electrical engineering. I enjoy working together with other engineers and stakeholders to find a balance in design and function. In my mind, there is nothing more rewarding and fulfilling than developing a good idea from conception to production.By conceiving, designing, and manufacturing using the latest innovations and techniques, I create value.
I was born in Breda and raised in California. I grew up in a small surfing town called Laguna Beach. After highschool I moved to the Netherlands and studied Industrial Design Engineering at the University of Twente.
My first access to 3d printers and laser cutters was in highschool. Ever since, I've been honing my design and production skills in all sorts of personal and client projects. Like many good engineers, my foundation is set in Legos and has evolved to projects such as opto-mechatronic systems, drone designs, e-bike builds, lighting designs, and smart home systems.

Curriculum Vitae
Work Experience
R&D Prototyping
Client and University of Twente
- Lead the technical development of a patented advanced sensing technology. Working together with the clients’s management and software engineers as well as the University of Twente researchers and project managers.
Enschede, NL, 2024-2025Workshop Technician
DesignLab (makerspace)
- Run laser cutter and 3D printers (FDM, SLA)
- Teach others how to use workshop tools safely.
- Help students in building prototypes and provide solutions/advice.
Enschede, NL, 2022-2025Thesis
Corvus Drones
- Researched drone tech and developed two concepts for the next generation Corvus drone.
- From research, to conceptualizatiion, to prototype, and testing.
Ede, NL, 2024-2024Solidworks and Fusion 360 Teacher
University of Twente
- Help students learn CAD programs online and in person.
Enschede, NL, 2023-2025Engineering Intern
Cerno (high-end lighting)
- Worked on manufacturing/production improvements following lean practices.
- Designed and created drawings for parts in solidworks.
Managed ERP inventory using Sage 100.
- Created, updated and managed manufacturing stations.
Irvine, CA, USA, 2019
Information
LanguagesDutch (native fluency), English (native fluency)Driving LicenseDutch and United States car licences
Education
Bsc Industrial Design Engineering
University of Twente (Enschede, NL)Bridge Year
Irvine Vally Collage (Irvine, CA, USA)High School
Laguna Beach High School (Laguna Beach, CA, USA)
Skills
SoftwareSolidWorks, Autodesk Fusion 360
Blender
OpenFoam
Adobe Illustrator, Procrerate
ArduPilot (Autonomous Drone)
EasyEDA (PCB Design)
Ansys Workbench
C, C++Hardware3D printing - FDM, SLA
Laser Cutting - CO2, Fiber
Lathe, Milling machine
Soldering
ESP32 and Raspberry PiInterpersonalMultidisciplinary environments
Collaborative
Adaptability
Results driven
Creativity
Projects

Developing an Advanced Spectral Imaging System (2024-2025)
Designed and built an automated imaging system for a client together with management and researchers to create a functional opto-mecatronic system to align a specialized laser and camera system. The contraption was ultimately patented (US12523529B2, etc.) and is being tested at various sites around the world. (Brief due to confidentiality)
I was asked to lead the techincal development of the next generation after sharing my ideas for the future of the product.
Lifting Body Drone (ongoing project)
The idea behind the project was to create a vertical takeoff and landing UAV to explore mountains and valleys from the above. While also being able to survey land to create gaussian splatting 3D models.
In this project I learned more about flying wings, autonomous control software, and cfd simulation.
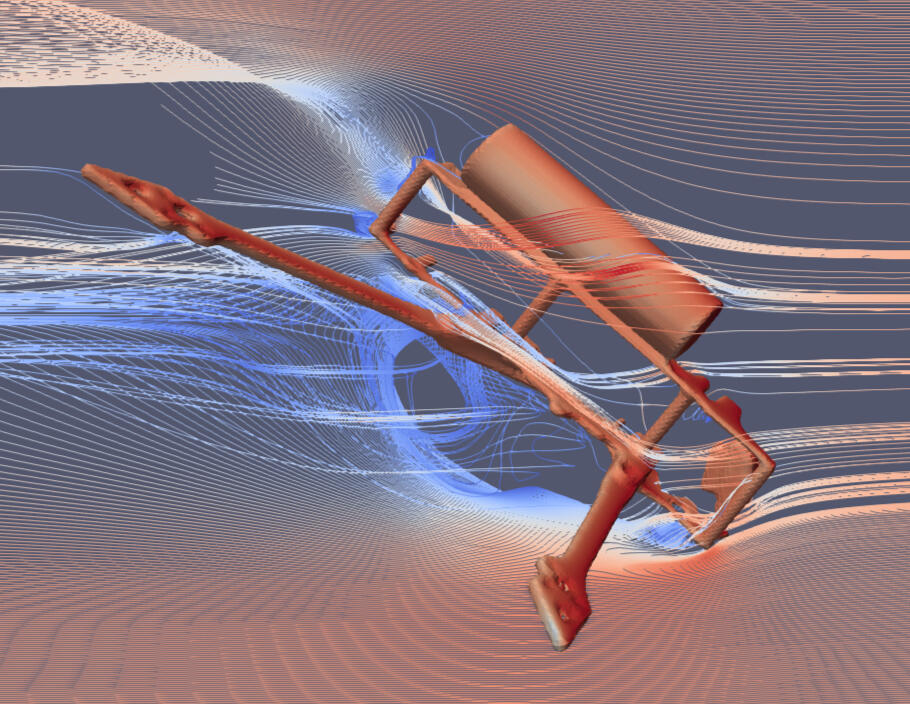
CFD of a generic ~250g fpv drone.
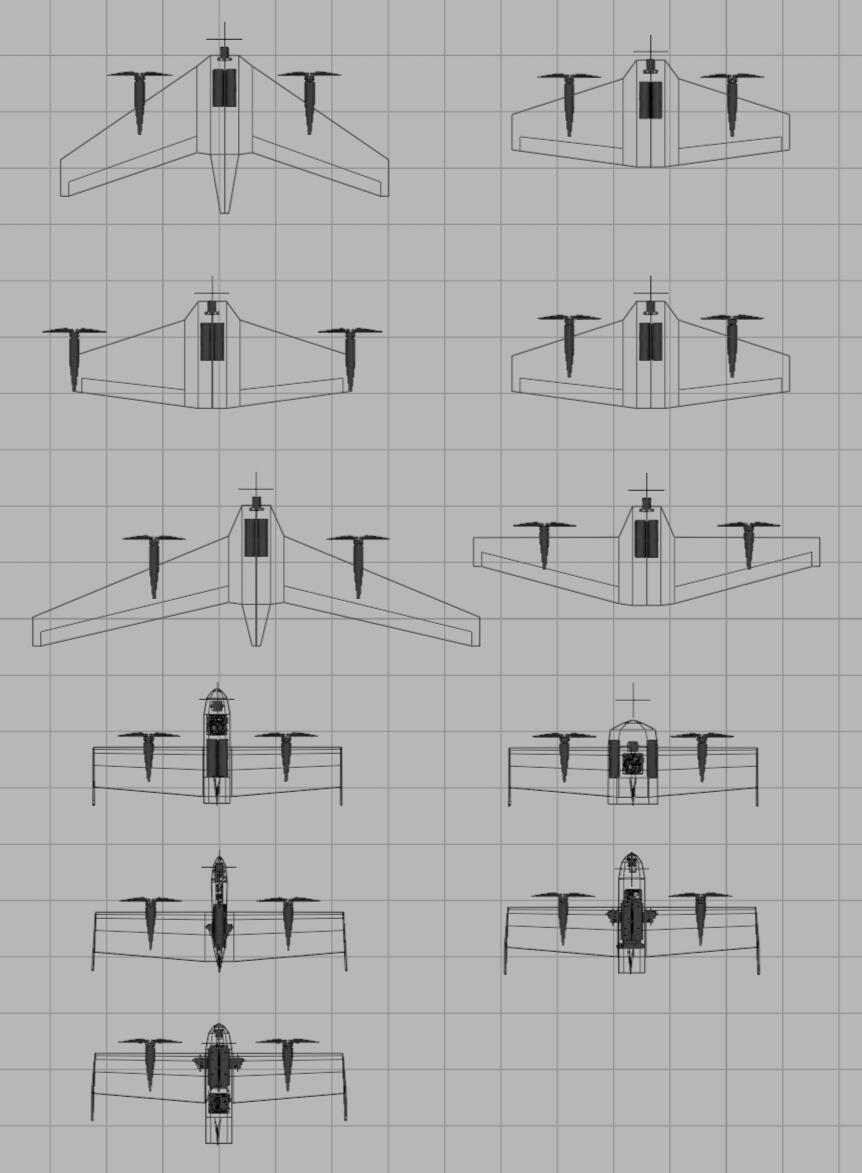
Rapid Ideation on flying wing layouts.
Generic fpv drones like the one seen in the CFD simulation above are not optimised for level forward flight. Rough simulation results suggest that at 60 km/h the generic drone produces 40 grams force of downforce and 80 grams force of drag. This can be improved.Constraints and requirements were set, and an initial parts list was made. Based on this, I ideated various layouts of flying wings and quads.
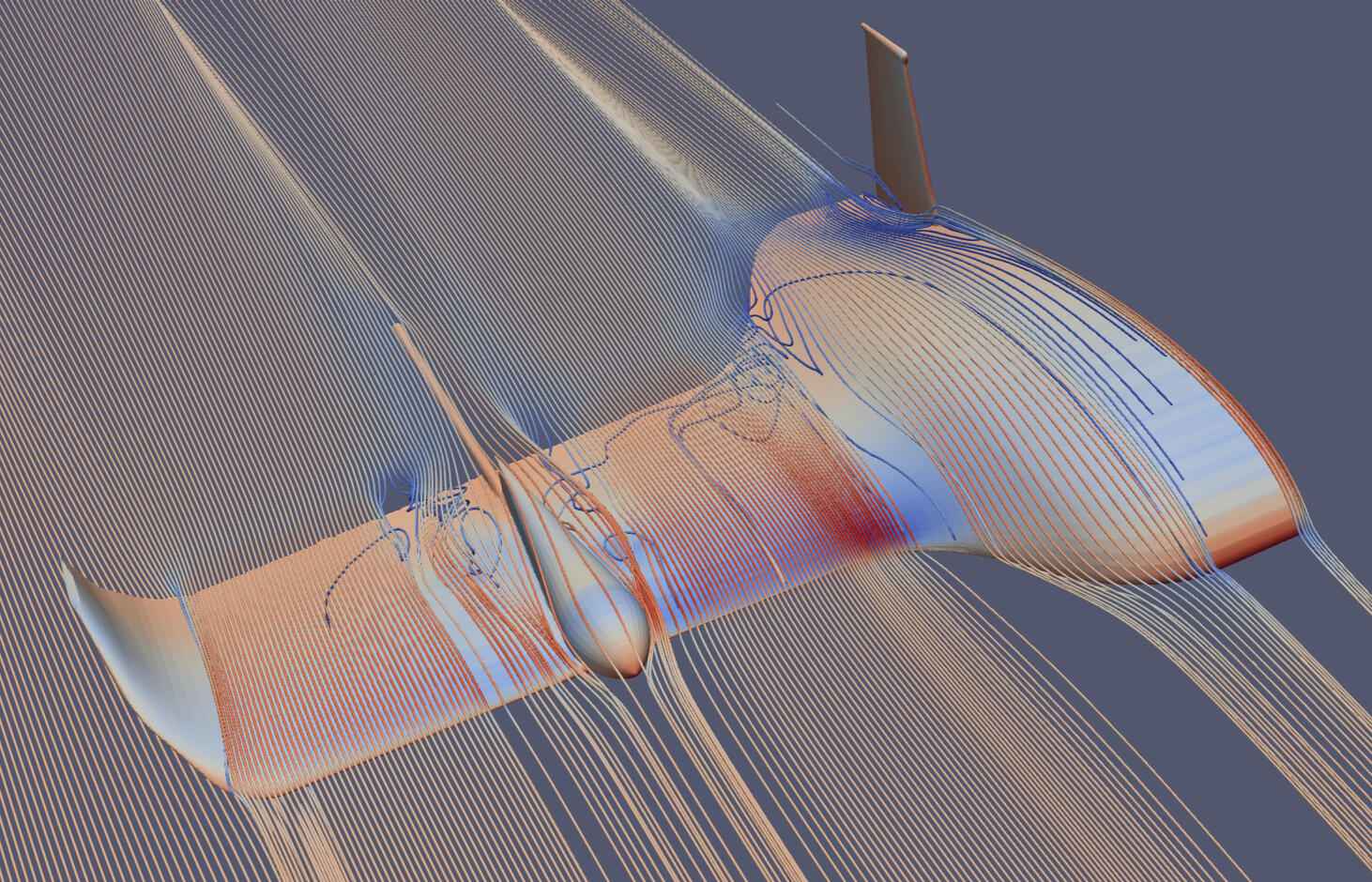
CFD testing of a concept
H-frame quad wing layout
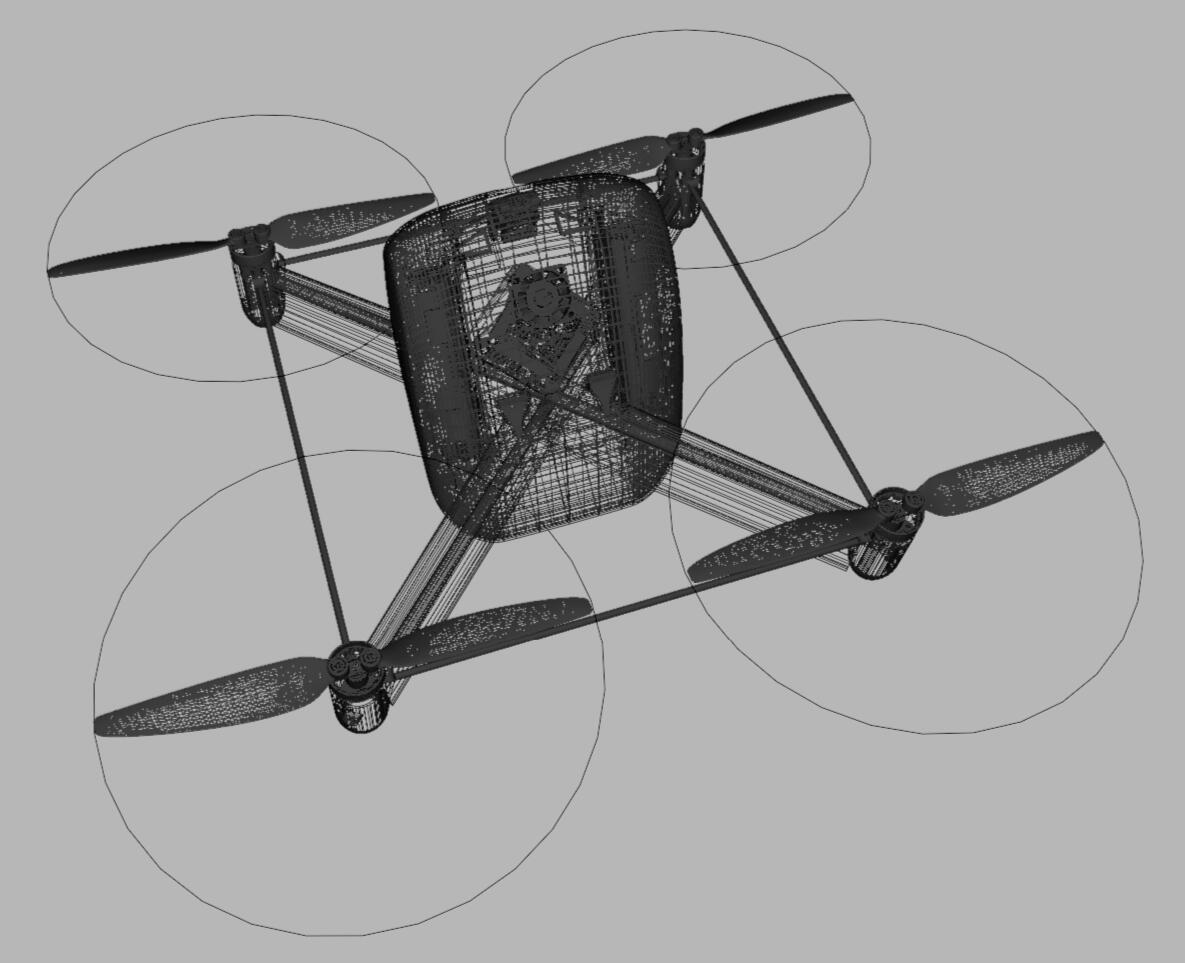
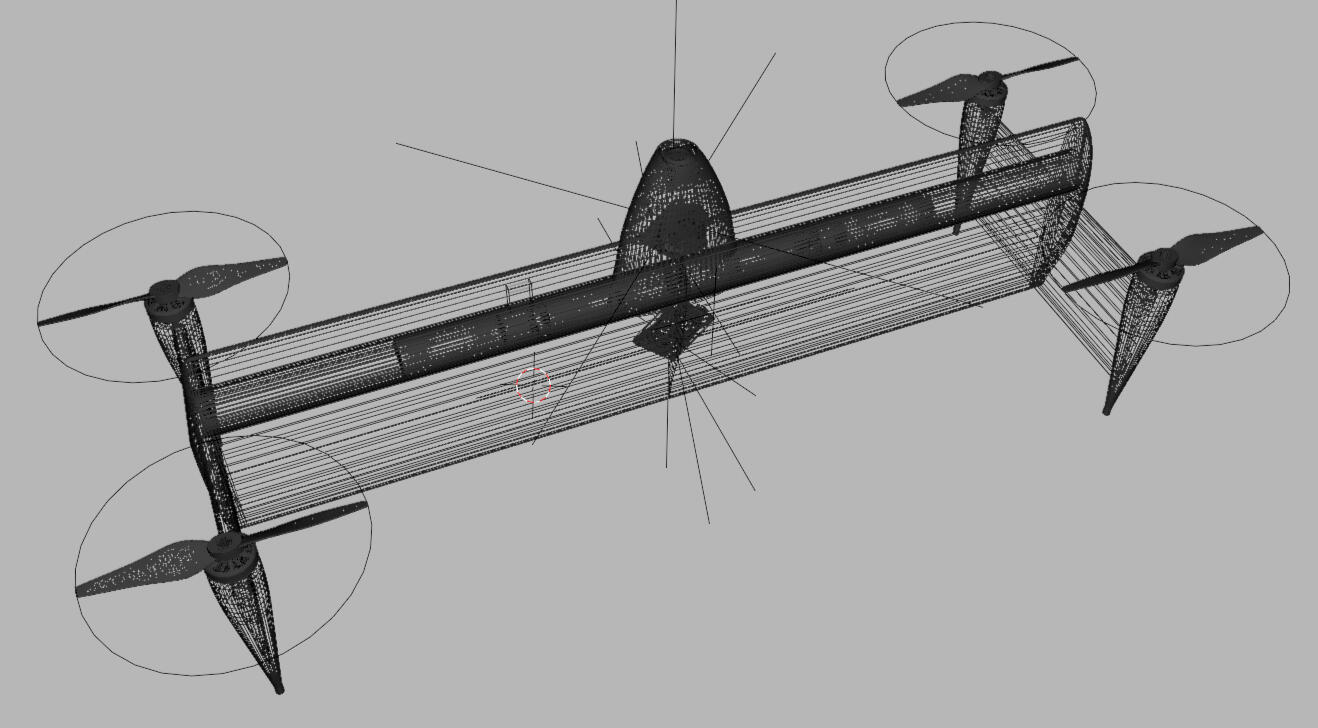
X-frame quad wing body layout (QuadV5)
After analyzing the risk and reliability of critical components and flight modes, I decided that a lifting body quadcopter configuration was the safest option.I then validated the design in CFD. Props were omitted for simulation simplicity. I would have liked to do a modal analysis; however, I did not have access to the required software during this project. We will see how this bites me later.
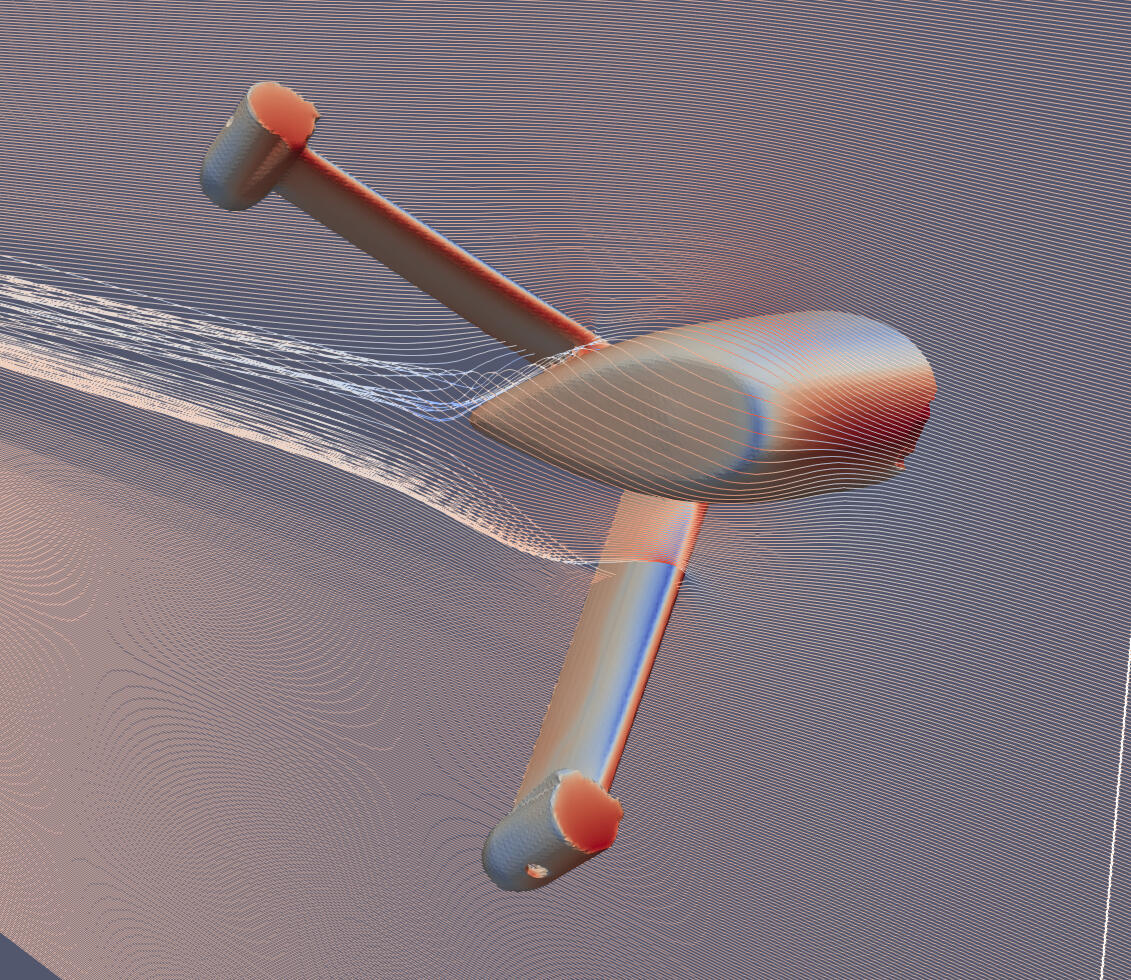
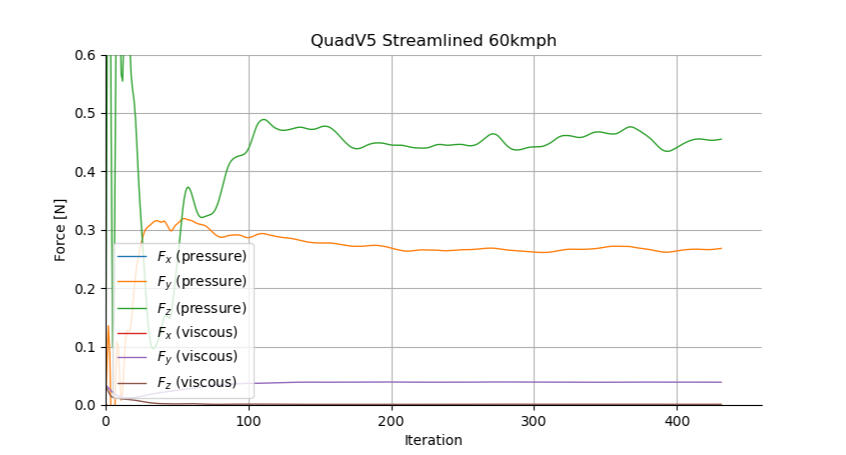
X-frame quad wing body CFD test (QuadV5)
The new design (QuadV5) showed promising results with 94 grams force of lift and 55 grams force of drag at 60 km/h.But what does this mean? The generic drone roughly needs to produce 130 grams force more thrust than the streamlined design for the same speed.
(All simulation parameters were identical for both simulations.)
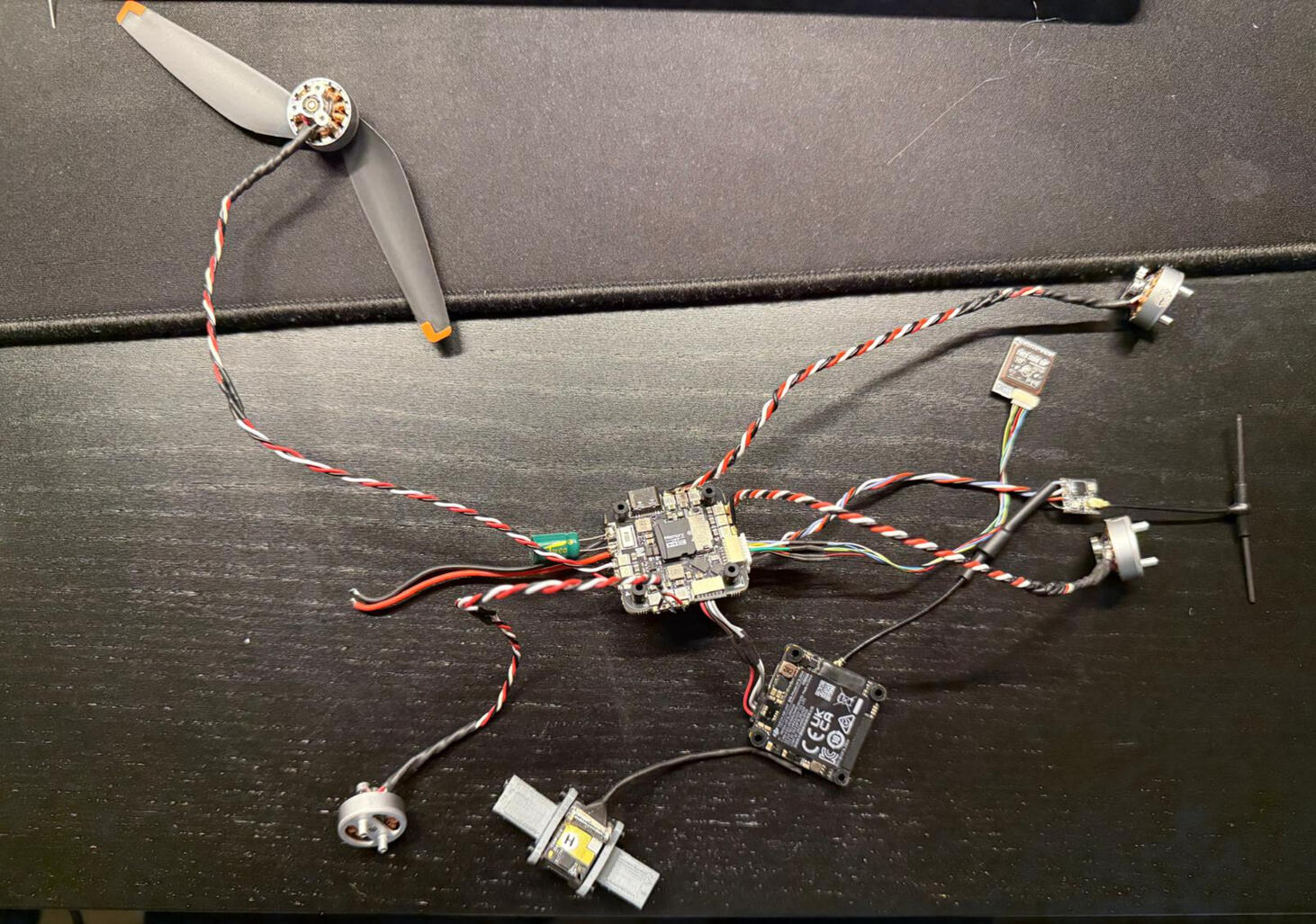
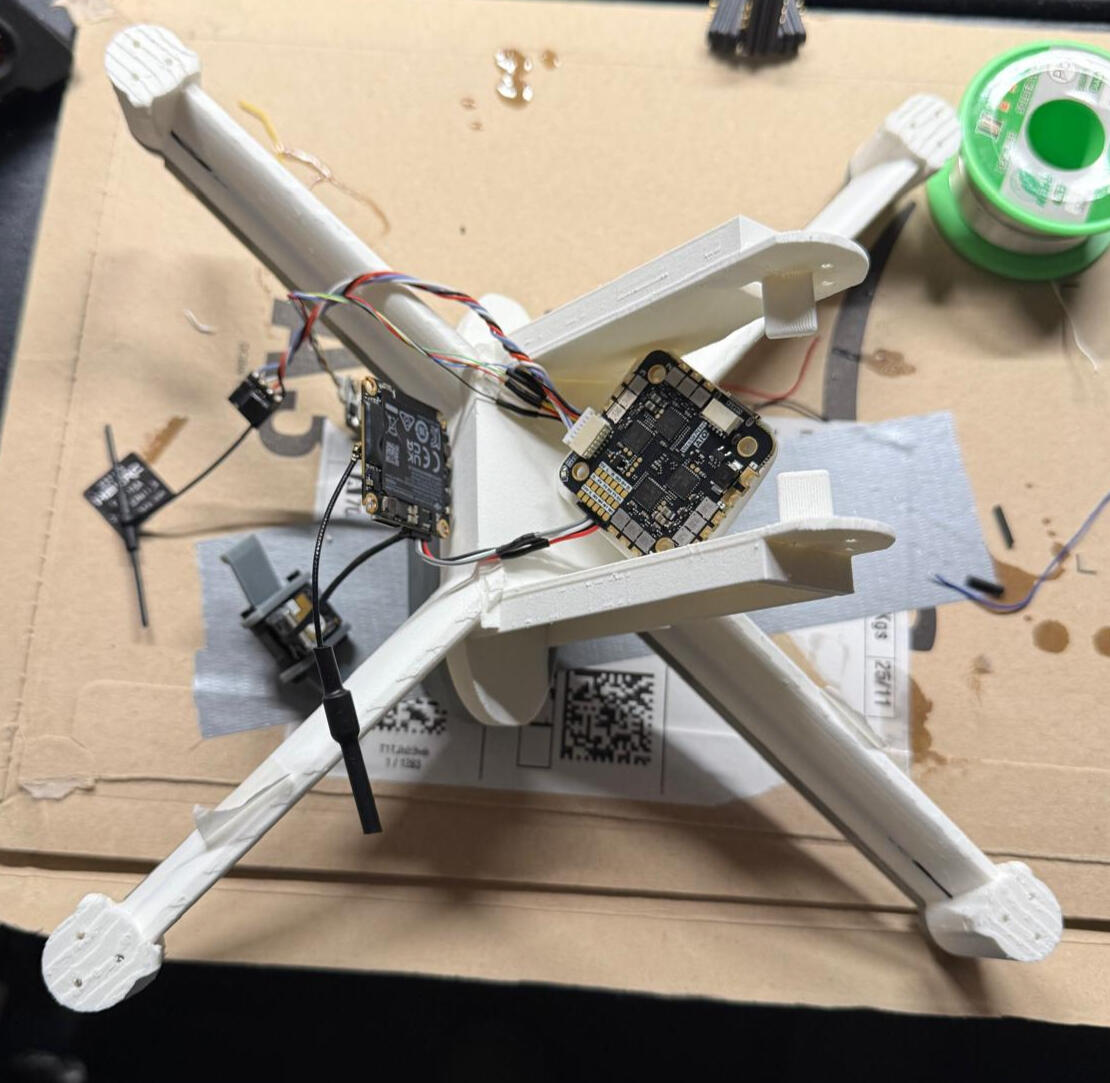
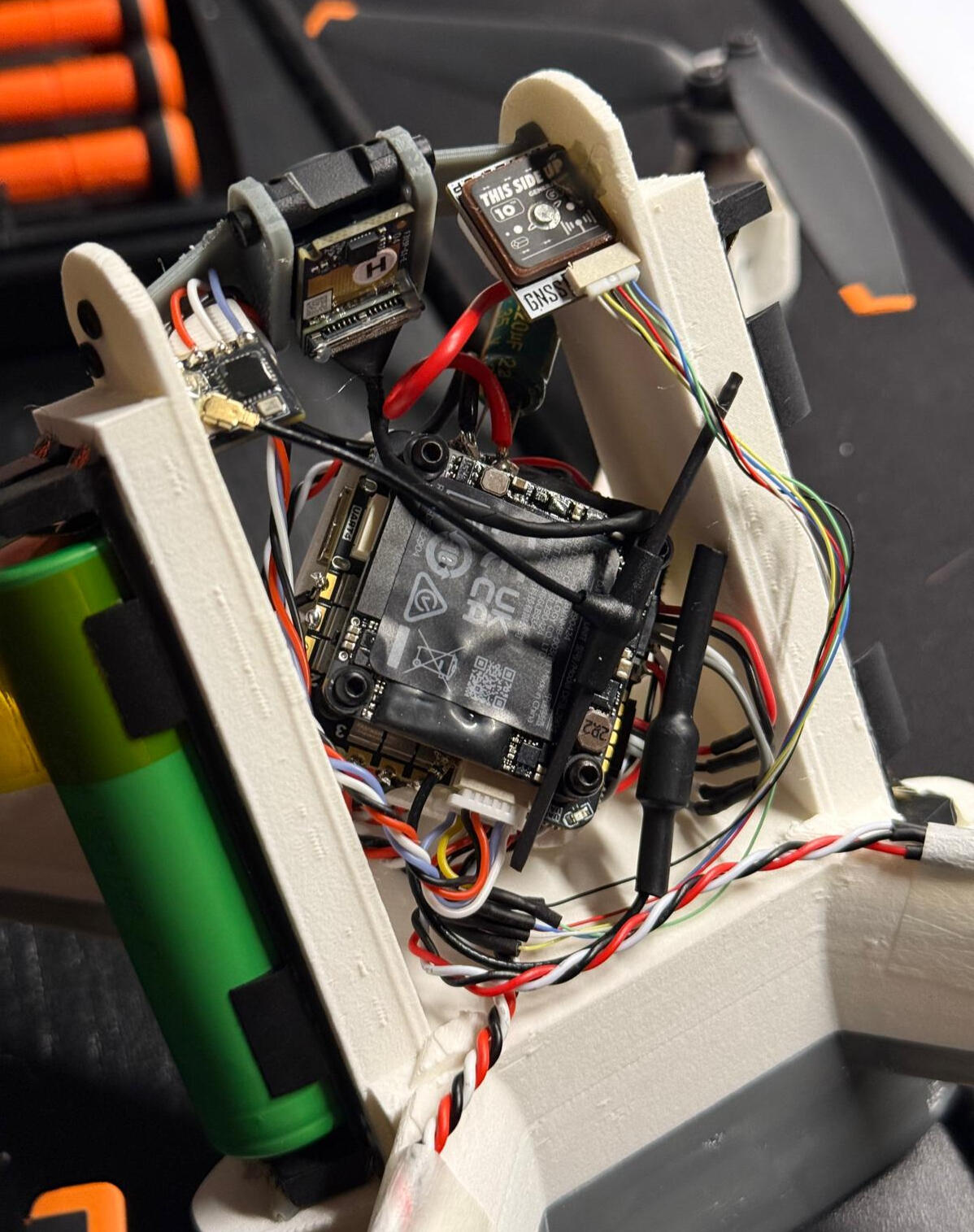
The frame consists of a lightweight foaming PLA body, two perpendicular carbon tubes through the arms, and four smaller carbon rods to reduce torsional vibrations. As well as a soft TPU base for landing durability.The takeoff weight of the drone is 284.5 grams. Slightly over the 250-gram goal.
Before taking flight, IMU filter tuning and PID tuning were done to ensure stability during flight.
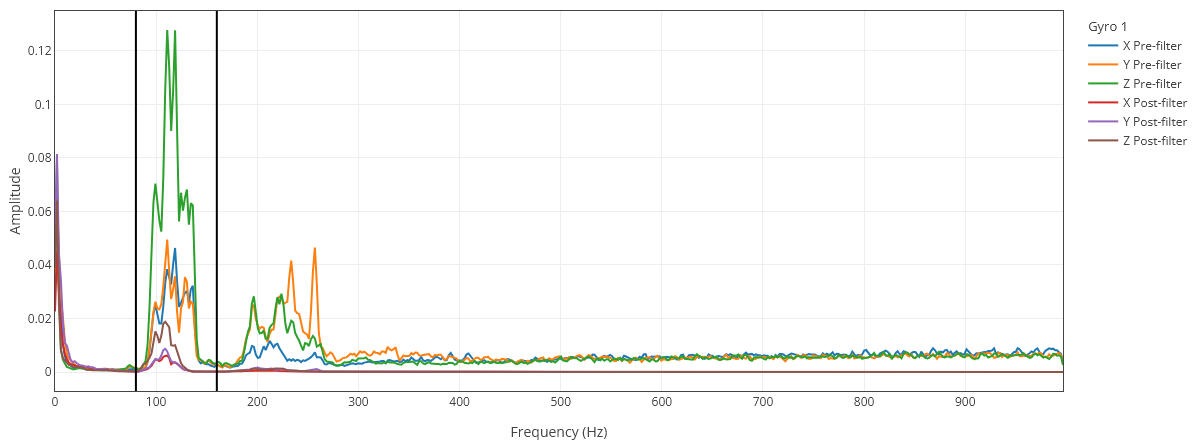
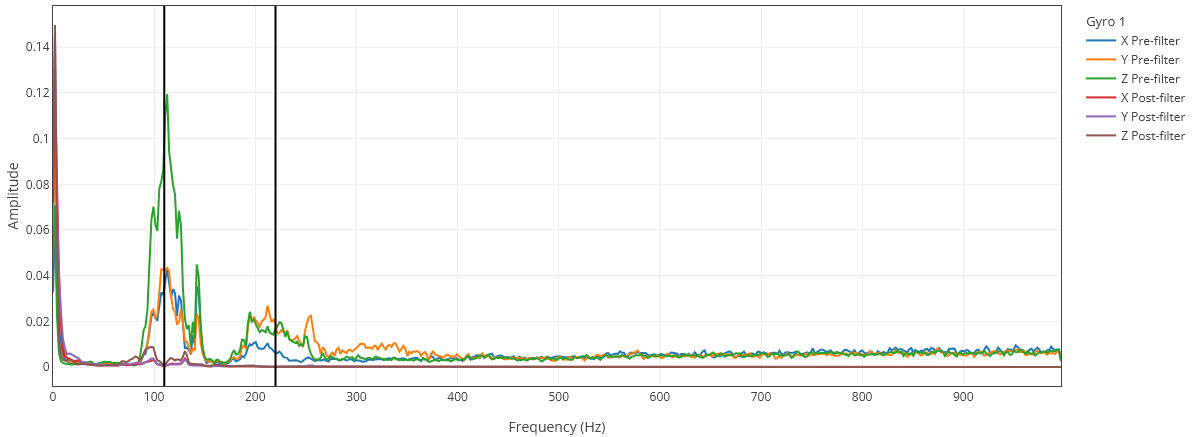
IMU notch filtering before and after.
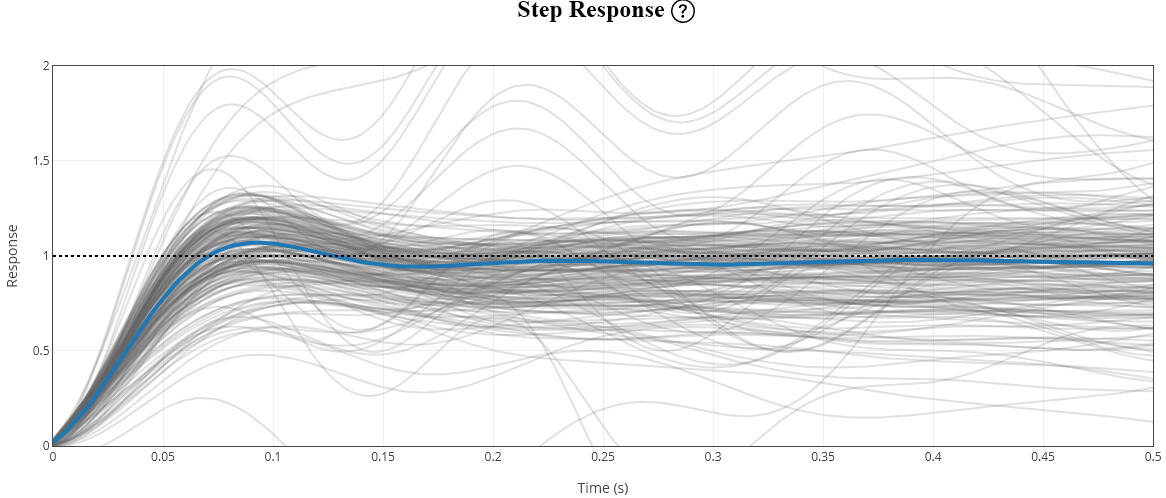
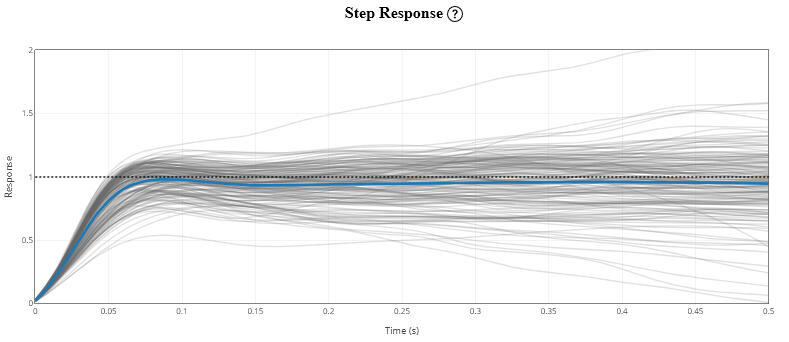
PID tune before and after.

The first flight test went better than I could have hoped for. Three successful takeoffs and landings with lots of data to analyze.However, I noticed at high speed there was a significant amount of vibration. This could have been avoided if I had access to modal analysis tools.


Unmanned Ground Vehicle (2022)
The goal of the UGV was to create a research platform for autonomous tracked vehicles. Together with a friend, we designed and built the prototype using university workshops.The UGV was first conceived in NX. Throughout the design process, we made sure to focus on DFMA. As our manufacturing options at the university were limited.To make it easy to demo, we utilized a PS4 game controller and LEDs to indicate its state.This project was completed within one academic quarter.
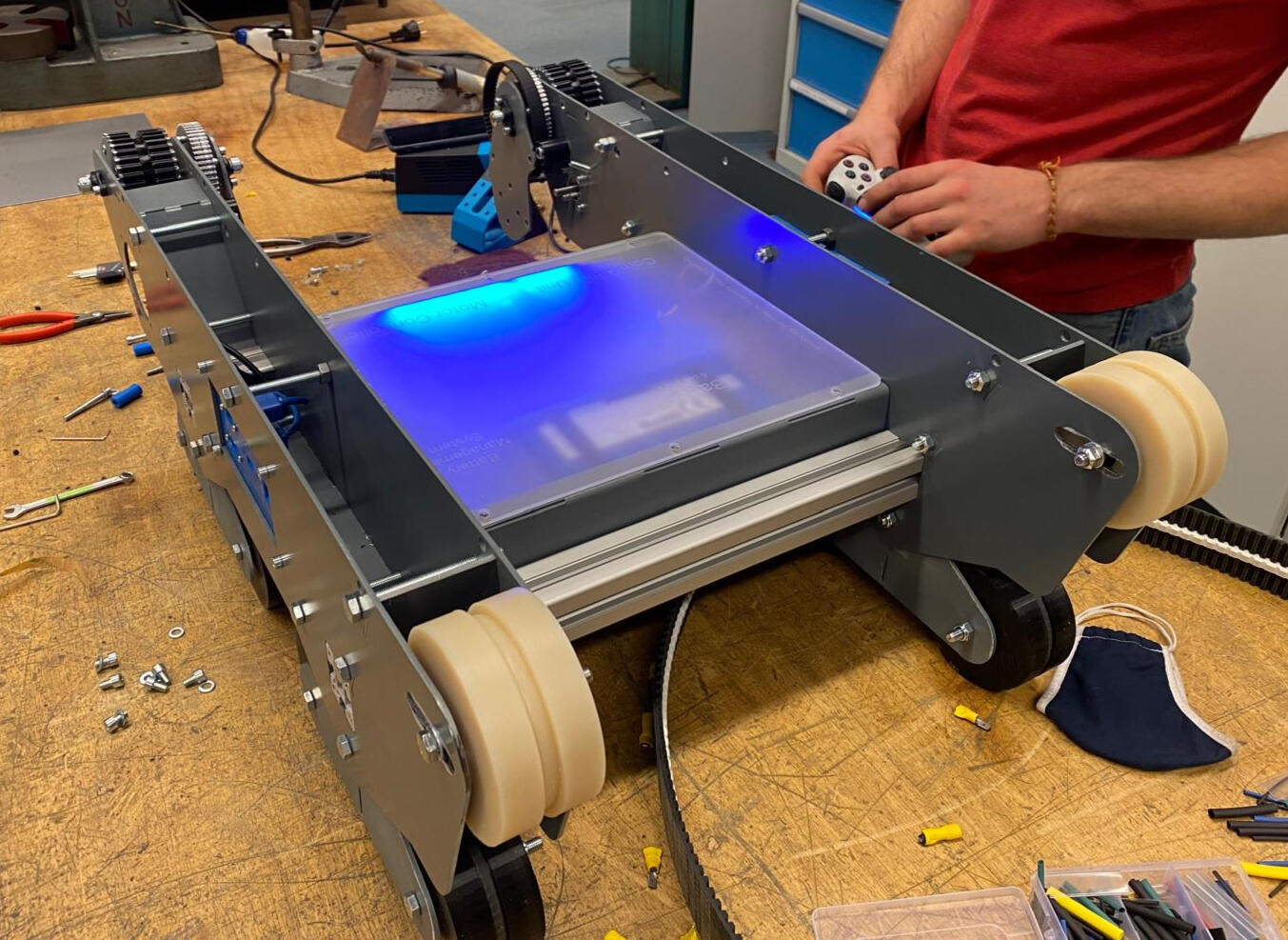
Testing systems without tracks installed.
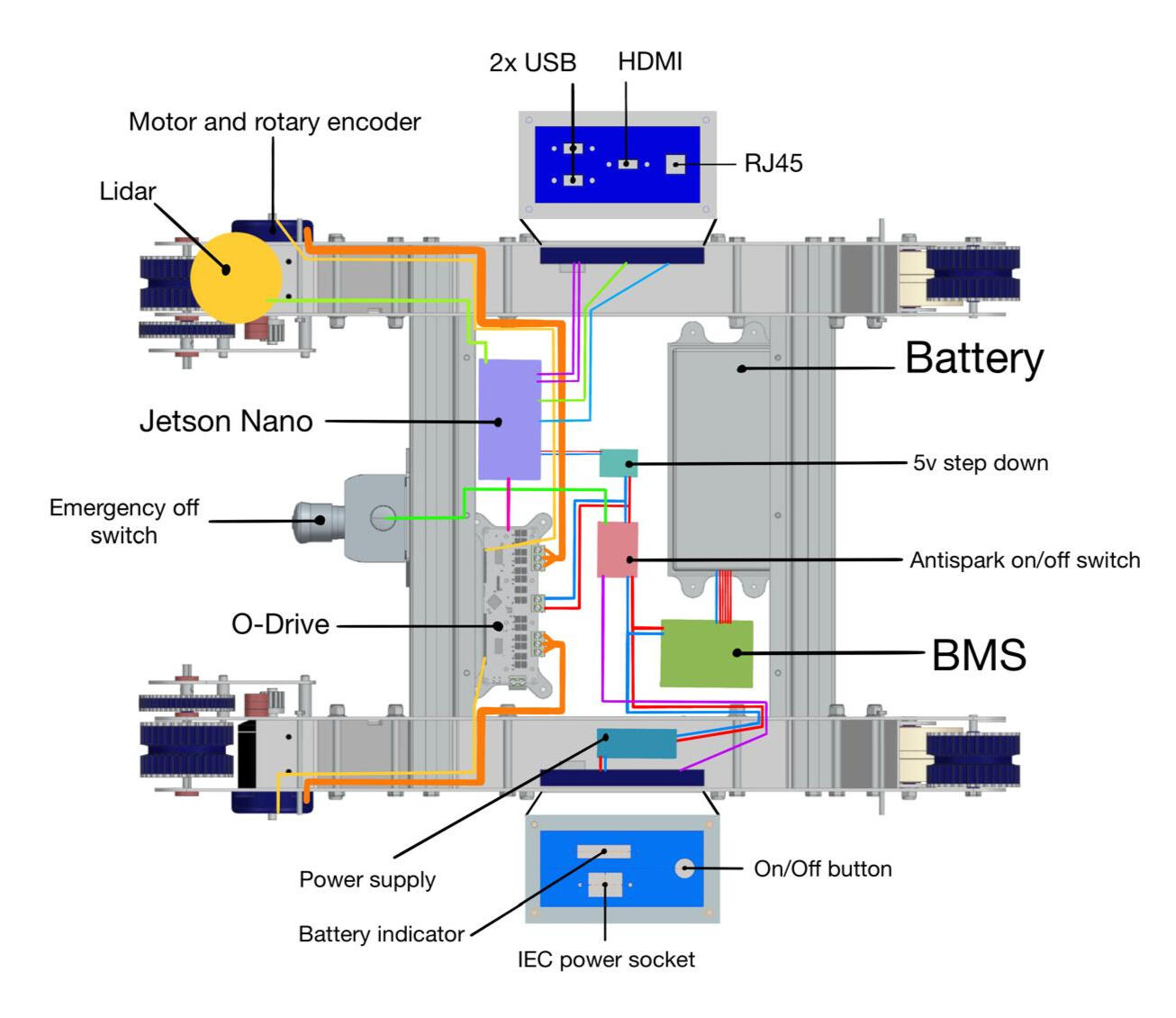
The wireing diagram for the UGV.
Pager (2023)

The pager was designed to solve a problem for the Design Lab staff. To open the door at night, a client would need to ring the bell, which would notify the staff to open the lock manually. This was problematic since staff members weren't often near or even in earshot of the doorbell and release button. Clients would need to ring multiple times in order to gain access.To solve this, I designed Pager. Named after the small notification devices used throughout the 70s-90s. It emits a beep and a flash of light when a client rings the bell. The staff member can then press a button on the top of the device to let the client into the building remotely.The Pager featured a lithium-ion cell powering an ESP32. As well as a base station that stores and charges the device before the next night shift.
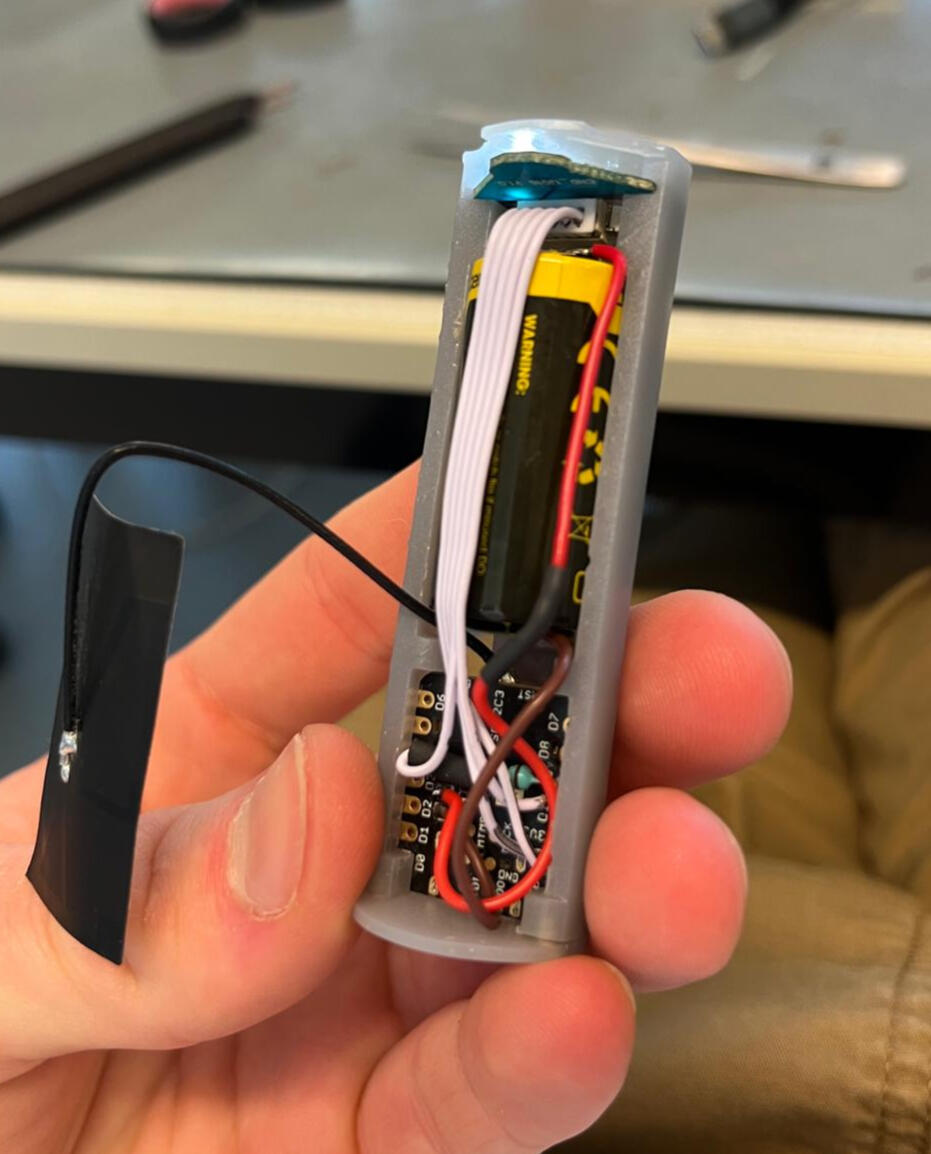
Interior view

Connection to the base station
Renders and Animations

Render for an agriculture innovation project.

Drone concept renders
Heat recovery animation for a client.

Various Lamp Projects

A lamp I made for my mother. Inspired by numerous rose paintings she has made.

A long cow lamp for a friend who lives on the Lange Koestraat.

Ikea lamp modified to house programmable leds.
A color-changing ring lamp for my girlfriend. With remote controll
These are just a few examples of the many projects I've completed to date.

Let's get in contact!
Mijn moedertaal is Nederlands en Engels. Ondanks dat mijn portfolio volledig in het Engels is geschreven. Ik spreek ook ein bisschen Deutsch, aber nicht viel.I look forward to meeting you and talking about the interesting work being done at your company. And how I could contribute to its success.